



T-MOTOR F45A 6S BULLET ESC
₹3,254.99
Features
1. Arm 32-bit Cortex core MCU, operating frequency up to 48MHz;
2. BLHeli-32 firmware, fast response speed, superb performance;
3. Auto detection on throttle signal, support pulse width PWM (1-2ms), Oneshot125 (125-250us), Oneshot42 (41.7-83.3us) and
Multishot (5-25us):
4. Dshot signal (up to Dshot 1200) compatible;
5. Auto-braking for high efficiency. When throttle is pulled down, motor will react fast on such change to slow down;
6. For racing drones with motor of high KV and power;
7. Twisted pair(TP) throttle signal wires reduce the crosstalk during signal transmission which guarantees stable flight;
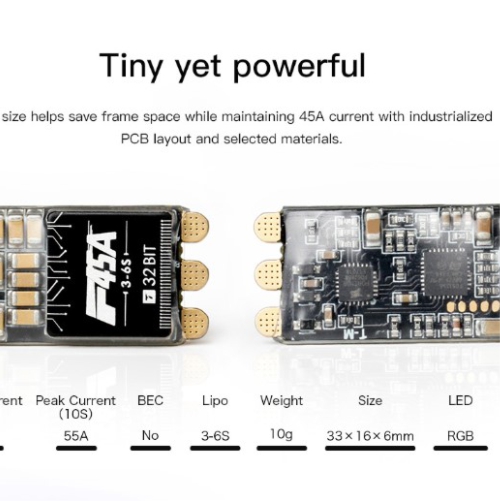
8. Aluminium alloy radiator for cooling performance; RGB led lights are available.
Adjustable Parameters
All the parameters below should be set via BLHeliSuite 32 software.
1.Startup Power
Startup power refers to the max. power allowed at startup stage, which can be any relative value from 0.03 to 1.5. For low BEMF voltage detection, the max. power is limited at low RPM.
In addition, startup power, which restricts the power of rotating direction change, shows its influence on bidirectional setting. Real power depends on input throttle, but the min. value should not be lower than 1/4 of the max. power.
2.Motor Timing
Generally, medium timing suits most of the requirements. In case of motor vibration, please try changing motor timing. It takes longer for high induction motors to demagnetize for direction change which leads to motor stalling or vibration on quick throttle increase. This phenomenon occurs especially at low RPM. High timing allows longer time for demagnetization, and thus helps to improve the above mentioned issue.
3.PWM Frequency
Motor PWM frequency can be set any value between 16KHz to 48KHz. Motors run more smoothly at high PWM frequency.
4. Demag. Compensation
Demag. compensation is meant to avoid motor stalling from motor rotating direction change. It is typical that motor stalls if throttle is pulled up too fast especially when motor is running at low speed. As mentioned above, high timing helps with that, however, it brings efficiency down. Technically, higher demag. compensation parameter means better protection. Nevertheless, if demag. compensation parameter is set too high, max. power drops slightly.
5.Max. Acceleration
Max. acceleration can be set between 0.1%/ms-25.5%/ms. When max, acceleration is set to be the max. value, acceleration is not limited. The main reason to set limitation on acceleration is to avoid desynchronizing from acceleration variation. For instance, when it is set 10%/ms, it means power added to motor should not be over 10%/ms.
6.Motor Rotating Direction
Motor rotating direction can be CW, CCW, bidirectional CW and bidirectional CCW. In bidirectional mode, center throttle stands for null throttle. If throttle position is above the center, motors rotate CW. Otherwise, motors will rotate in a reversed direction. Bidirectional mode will invalid throttle calibration setting.
Related products
-
615 Magnetic Micro Coreless Motor for Micro Quadcopters – 2xCW & 2xCCW
₹897.75 -

64mm EDF 3S 1.32kg thrust
₹3,675.00 -

Hobbywing XRotor X8 Motor and X8 3090 or 3011 Folding Propeller Combo Kit – CW
₹16,275.00 -

SimonK 30A BLDC ESC Electronic Speed Controller Without Connectors
₹362.25 -

Emax ECOII 3115 900KV 10inch Frame Brushless FPV Motor (Set of 4)
₹15,750.00 -

Tarot Brushless Motor 3115-900KV- TL1616
₹3,990.00 -
Sale!

XING 2205 FPV Motor 2300kv 6S 3.5inch Cinewhoop
Original price was: ₹10,299.00.₹9,449.00Current price is: ₹9,449.00. -

Emax BLHeli Series 30A ESC with Oneshot (Original)
₹1,522.76 -

T Motor MN6007II Antigravity Type 6-12S UAV Motor 160 KV
₹18,900.00 -

ReadyToSky 2212 920KV Brushless Motor For Drone – CW (Clockwise) Direction
₹681.45