








Difference between Pixhawk 2.4.8 & 2.4.6:

Features of Pixhawk 2.4.8:
- The advanced 32-bit ARM CortexM4 high-performance processors; can run NuttX RTOS real-time operating system.
- 14 PWM / servo output.
- Bus interface (UART, I2C, SPI, CAN).
- The integrated backup power and backup controller fails; the primary controller fails over to the backup control is safe.
- Provide automatic and manual modes.
- Provide redundant power input and failover.
- Multicolor LED lights.
- Provide a multi-tone buzzer Interface.
- Micro SD card to record flight data.
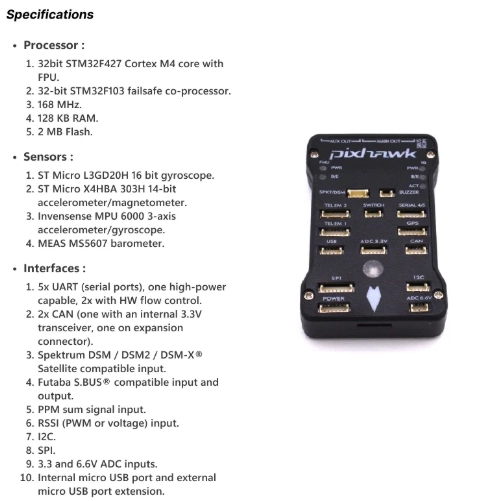
Specifications:
Processor:
-
32bit STM32F427 Cortex M4 core with FPU.
-
32-bit STM32F103 failsafe co-processor.
-
168 MHz.
-
128 KB RAM.
-
2 MB Flash.
Sensors:
-
ST Micro L3GD20H 16 bit gyroscope.
-
ST Micro X4HBA 303H 14-bit accelerometer/magnetometer.
-
Invensense MPU 6000 3-axis accelerometer/gyroscope.
-
MEAS MS5607 barometer.
Interfaces:
-
5x UART (serial ports), one high-power capable, 2x with HW flow control.
-
2x CAN (one with an internal 3.3V transceiver, one on expansion connector).
-
Spektrum DSM / DSM2 / DSM-X® Satellite compatible input.
-
Futaba S.BUS® compatible input and output.
-
PPM sum signal input.
-
RSSI (PWM or voltage) input.
-
I2C.
-
SPI.
-
3.3 and 6.6V ADC inputs.
-
Internal micro USB port and external micro USB port extension.
Pixhawk Pinout Connections Ports :

Package Includes :
1 x Pixhawk 2.4.8 32 Bit Autopilot PX4 Drone Flight Controller.
3 x Connecting Cables.









